
A person walking with a backpack equipped with a GPS receiver, inertial unit and LIDAR (laser scanner)
is able to measure a large area within several dozen minutes. The person's position is determined by
a GNSS receiver whose measurement is corrected by corrections from RTCM base stations.
Corrections are received by the GSM modem. Our solution is based on hardware RTK 2.0 correction.
Coordinate measurement alone is not enough. The orientation of the scanner relative to the ground is also
important to determine the direction of the laser beam. To obtain this data, we use an inertial unit (IMU),
which consists of accelerometers and gyroscopes. Orientation measurement is performed at a higher
frequency than provided by GNSS. Thanks to the use of the SLAM algorithm, we can more precisely
determine the position and orientation of the scanner.
LIDAR measures the distance to the earth's surface and other objects within the range of the laser beam.
Knowing the position and orientation, we are able to create an accurate elevation map of the area.
What's more, the measurement points form a dense grid covering the entire surface of the site,
which allows you to completely resign from conducting measurements using the traditional method.
The backpack is equipped with cameras that take pictures of the terrain during the measurement.
The photos are used to preview the real image and to color the point cloud.
The recorded data from the sensors are saved on a portable medium from which they can be imported
directly to Neocart. After initial processing in Neocart, the user receives a point cloud,
which is the basis for further work on the map for design purposes.
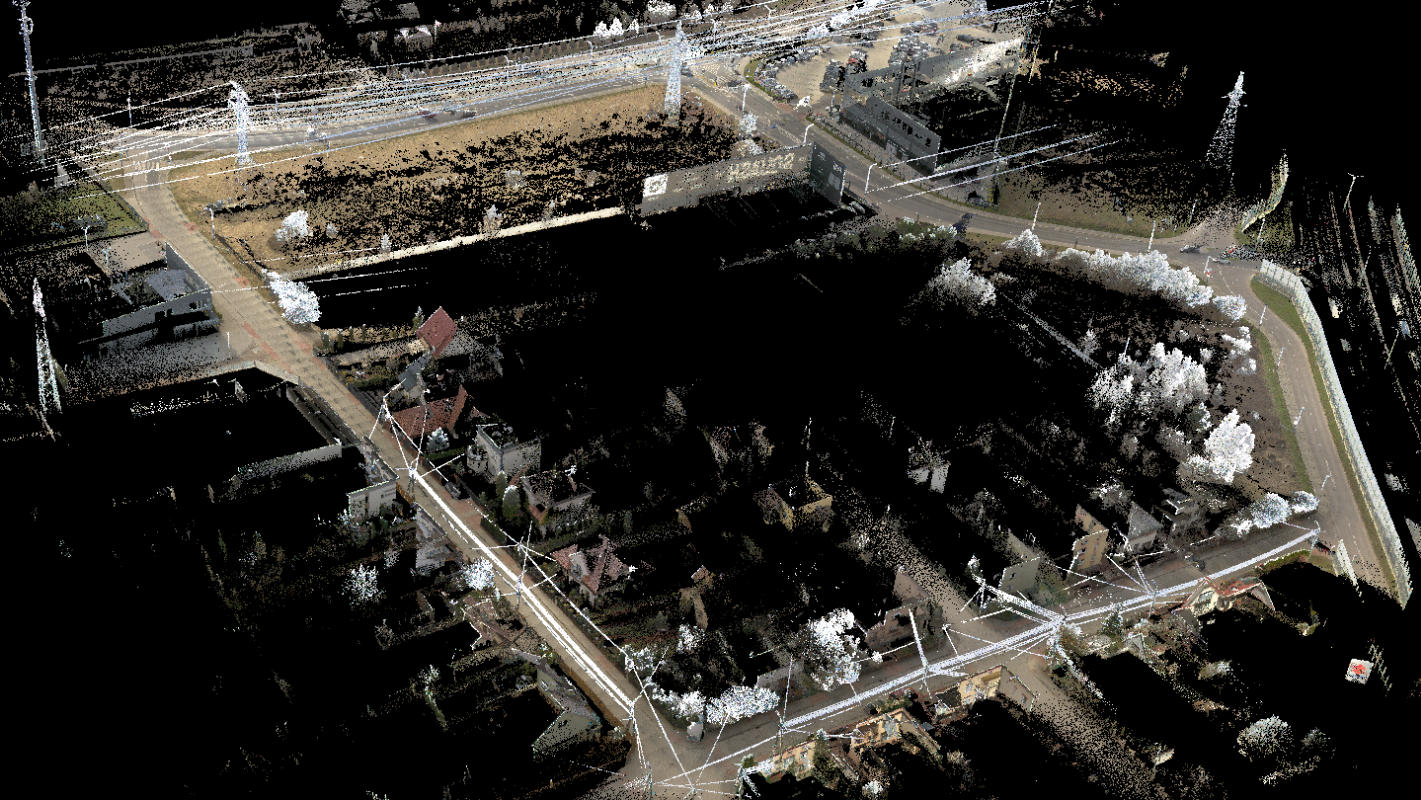
Here is a view of the 3D point cloud obtained thanks to our laser recorder BP-32: Demo Point Cloud .